
- 为备受期待的高精度服务型机器人提供“新慧动”
- 可应对全方位搬运辅助的功能/安全的机器人的实现。
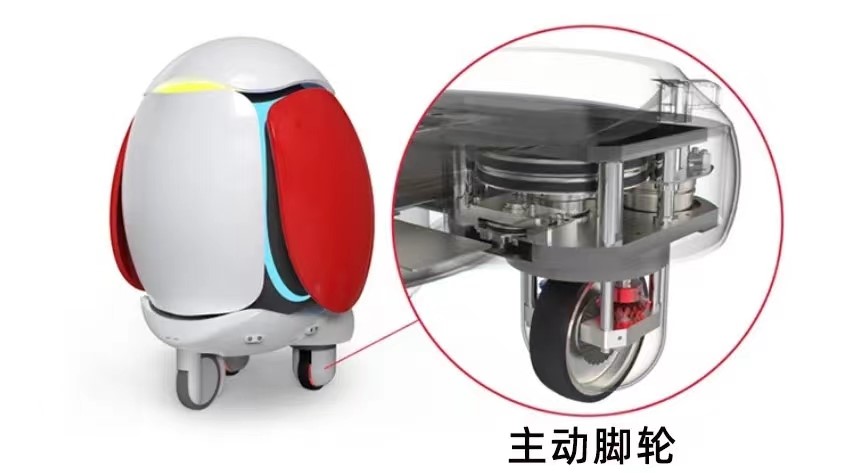
日本精工株式会社(以下简称,NSK)与东京理科大学(东京都新宿区)共同开发了可实现全方位平稳移动的“主动脚轮”。本产品不仅实现了小型化与低振动,同时提高了使用便易性。
NSK已于3月9日(星期三)~3月12日(星期六)在东京Big Sight国际展览中心(东京都江东区)举办的“2022国际机器人展iREX2022”上展出本产品。针对服务型机器人制造商及实际使用用户的推广活动已经开始,验证试验等销售准备工作正在进行中。
开发背景
为了实现更加和谐繁荣的社会,人们对服务型机器人的期待越来越高,市场的增长也备受关注。随着社会实际应用案例的增多,人与机器人的距离也越来越近,市场对更具有实用性(适应各种各样场景的功能与尺寸)和柔软性(与人类细微、流畅的动作相协调)的高精度服务型机器人的需求日益强烈。要想让服务型机器人在人类生活中和谐共存,就需要像人类一样可全方位移动。为此NSK与东京理科大学和田研究室共同开发了可全方位平稳移动的“主动脚轮”。
产品特征
-
全方位的平滑移动与小型化
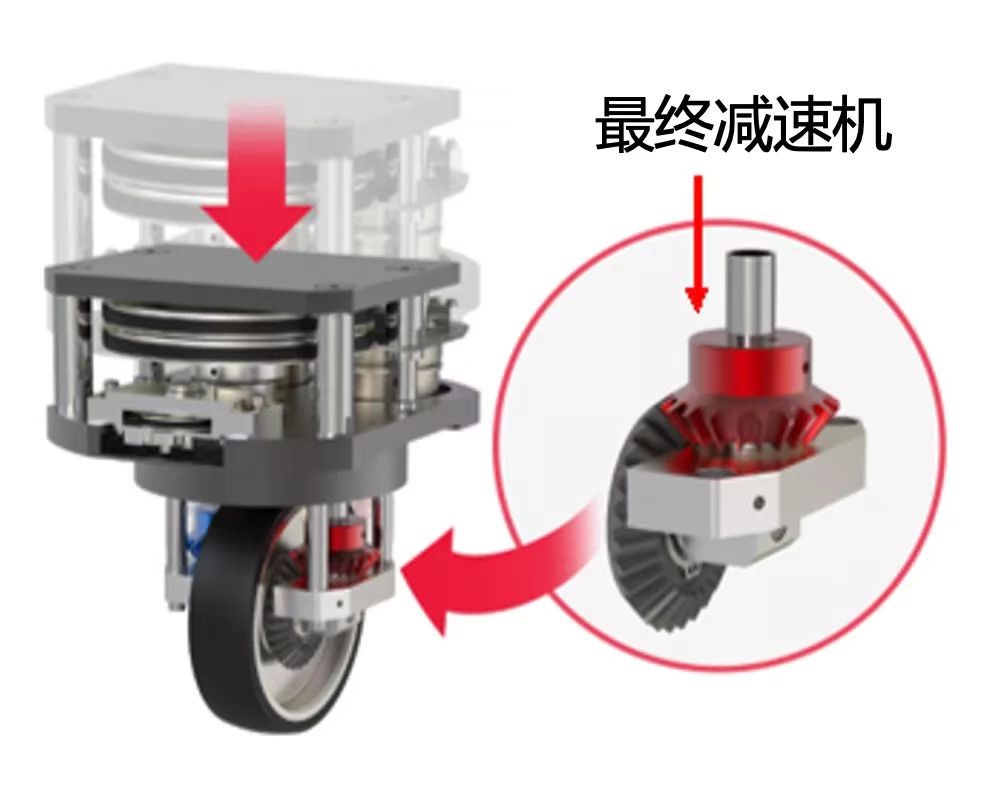
通过在车轮旁设置具有独立差动机构的最终减速机,使得小型车轮具有驱动及转向2种功能。
与一般驱动与旋转分开的机构相比,可选择更小的电机,从而实现小型化。
-
低振动
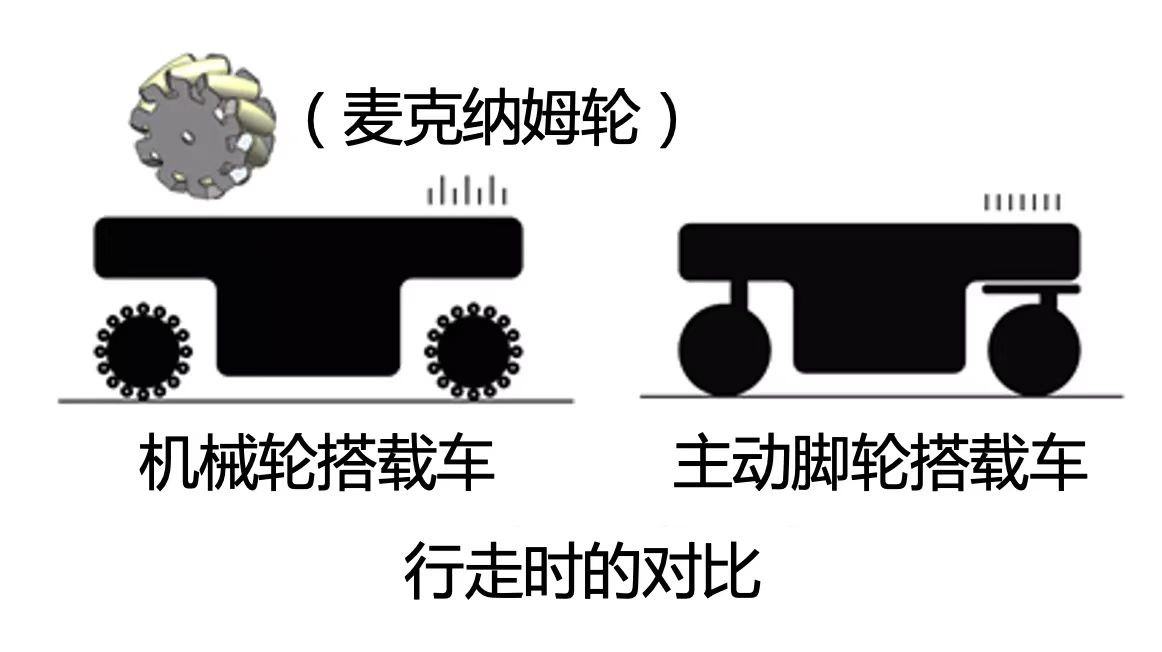
在全方位移动中通常使用的是麦克纳姆轮,由于集合了自由滚子,车轮的凹凸使得在走行时发生上下方向的振动。
而“主动脚轮”不采用麦克纳姆轮,使用普通的车轮,继而实现平稳的行驶。
-
易用性
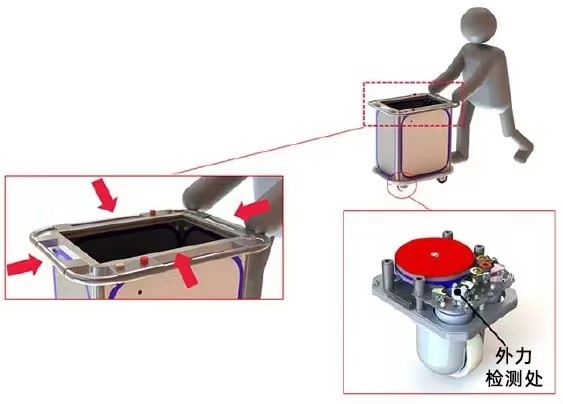
脚轮内置外力检测功能,可以检测人的推力,在对诸如搬运重物的推车、病床移动等搬运作业时,手持位置不受限制,可全方位启动搬送辅助功能。
NSK将继续通过Motion & Control TM(运行与控制)技术,为和谐安全的社会做出贡献。