
- 针对协作机器人的“新慧动”提案。
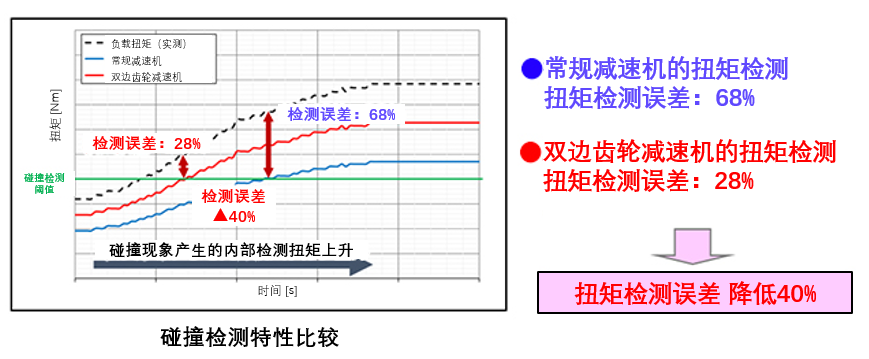
- 使高精度的碰撞检测成为可能,助力安心/安全的机器人的实现。
日本精工株式会社(NSK Ltd.,以下简称 NSK)和横滨国立大学(神奈川县横滨市)合作,成功开发了通过高精度检测,缓和与人或物体碰撞力的“协作机器人用执行器”。
NSK预计将于3月9日(星期三)~3月12日(星期六),在东京Big Sight国际展示中心(东京都江东区)举行的“2022国际机器人展(iREX2022)”中展出该产品。针对协作机器人制造商以及有意愿使用本产品的客户的推广活动已经开始,试验验证等销售准备工作正在进行中。
开发背景
为了实现更加和谐繁荣的社会,服务机器人市场的成长令人期待。近年,从解决劳动力短缺以及节省应对新型冠状病毒感染的人手方面考虑,将协作机器人引入生产线正在进行中。另一方面,对于与人类在同一空间协同工作的协作机器人的进一步普及,需要更多的安全保障,例如在与人或物体碰撞时缓和碰撞力等。为此,NSK和横滨国立大学的藤本研究室共同开发了能够实现高精度碰撞检测的协作机器人用执行器。
开发品特征
本开发品通过搭载横滨国立大学藤本教授发明的高效率反向运转双边齿轮,实现了反向运动时20%(与之前相比)的效率提升。据此,在机器臂与人碰撞时高精度检测出负载扭矩,通过控制电机,缓和人与机器人发生碰撞时的碰撞力。
而且,此次NSK开发的执行器可以自身检测出碰撞,与常规的机器人相比,无需额外配置检测用传感器及线束。
未来,该开发品有望应用于需要高精度负载扭矩检测的动力辅助机器人,医疗机器人和自主机器人(车轮打滑检测)等广泛应用领域。
NSK 将继续通过 Motion & Control TM (运行与控制)技术,为和谐安全的社会做出贡献。